
UAVs Professional-Grade Navigation and Control Fusion Solution for the UAV Industry
In today’s rapidly developing UAV industry, GNSS navigation systems are facing increasingly severe environmental challenges. With the growing density of urban airspace, UAVs often need to fly close to buildings—where GNSS signals may be reflected by high-rise structures (multipath), reducing positioning accuracy. As anti-UAV technologies become widespread, the electromagnetic spectrum environment has become more complex, leading to frequent GNSS interference and spoofing incidents. In mountainous areas, valleys, and forests, signal blockage and jumps are common, making traditional single-frequency GNSS navigation unable to meet the demands of reliable, high-precision flight. Leveraging its profound expertise in industrial UAV applications, Hangzhou AGR Intelligent Technology Co., Ltd. (AGR) has selected Septentrio’s mosaic-G5 P3 GNSS module to address these complex environmental challenges.

Combined with AGR’s proprietary integrated navigation strategy and flight control system (AG6), it creates an industrial UAV platform capable of maintaining precise, stable, and safe navigation in harsh environments.
In complex urban electromagnetic environments (such as dense 5G base station areas and industrial parks), the AIM+ advanced technology of the mosaic-G5 P3 module effectively mitigates various wireless interference signals. AGR’s flight control system continuously monitors navigation status and dynamically adjusts redundant navigation strategies to ensure the stability and safety of various UAV operations.
Core Challenges of Building Cleaning UAVs & Navigation Requirements
1. Safety Boundary Control During Ultra-Close-Proximity Flight
UAVs need to operate stably within 0.3–1.5 meters of glass curtain walls. Any horizontal or vertical positioning drift may cause collisions, leading to equipment damage or risks of falling objects from heights.
2. Dual Signal Interference from Urban Canyons and Curtain Wall Reflections
The “urban canyon” effect between dense buildings results in severe satellite signal blockage; large-area glass curtain walls and metal structures cause strong multipath reflections, seriously degrading positioning accuracy.
3. Rigorous Requirements for Platform Stability in Cleaning Operations
During cleaning, the reaction force generated by the brush disc or water spray device contacting the wall requires the UAV to have rapid and precise attitude adjustment capabilities to maintain a constant position, avoiding cleaning omissions or uneven patterns.
4. Long-Endurance Operations and Adaptability to Complex Weather
A single mission often lasts more than 30 minutes. The system must maintain continuous and reliable navigation output under temperature differences, gusts, and temporary signal blockage, while minimizing power consumption to extend endurance.
How the mosaic-G5 P3/P3H + AG6 Collaborative System Addresses Challenges?
1. Dual-Antenna Heading (P3H) + AG6 Heading Fusion for True North Lock and Wall-Parallel Maintenance
- The mosaic-G5 P3H delivers 0.15° heading accuracy with a 1-meter baseline, providing the UAV with true heading independent of magnetic interference.
- Through its built-in sensor fusion algorithm, the AG6 flight controller directly integrates dual-antenna heading as the primary heading reference, achieving absolute parallelism with building facades and avoiding cumulative errors.
- In steel structure areas or curtain wall frames with strong magnetic interference, traditional magnetic compasses may fail, while GNSS heading remains reliable.
2. AIM+ and APME+ Technologies Purify Urban Navigation Signals
- AIM+ (Advanced Interference Mitigation) real-time monitors and suppresses wideband and narrowband interference from in-building Wi-Fi, 5G base stations, and unknown radio frequency sources, ensuring the purity of signal tracking.
- APME+ (A Posteriori Multipath Estimation) specifically addresses complex multipath effects caused by glass curtain walls. Through post-processing estimation technology, it significantly reduces code and carrier phase errors, enabling horizontal positioning accuracy to remain at the centimeter level even in complex reflective environments.
3. High Update Rate and Low-Latency Positioning Empower AG6 for Precise Control
- The mosaic-G5 can output position/attitude information at up to 20 Hz.
- With its high-speed processing capability, the AG6 flight controller receives this high-bandwidth navigation data, enabling rapid updates of the control loop. This allows the UAV to respond instantly to gusts or contact reaction forces, maintaining precise tracking of cleaning paths.
4. Seamless Signal Interruption Handover to Ensure Operational Continuity
- When the UAV cleans balconies, recesses, or corners, satellite signals may be completely blocked for several seconds.
- The system achieves smooth seamless GNSS/INS switching through tight coupling between the mosaic-G5’s high-stability inertial aided output and the AG6’s built-in high-precision IMU. The AG6 can continue executing cleaning paths based on high-quality attitude and dead reckoning position data, ensuring uninterrupted operations.
Anti-Interference Test Case: JammerTest 2024 Results
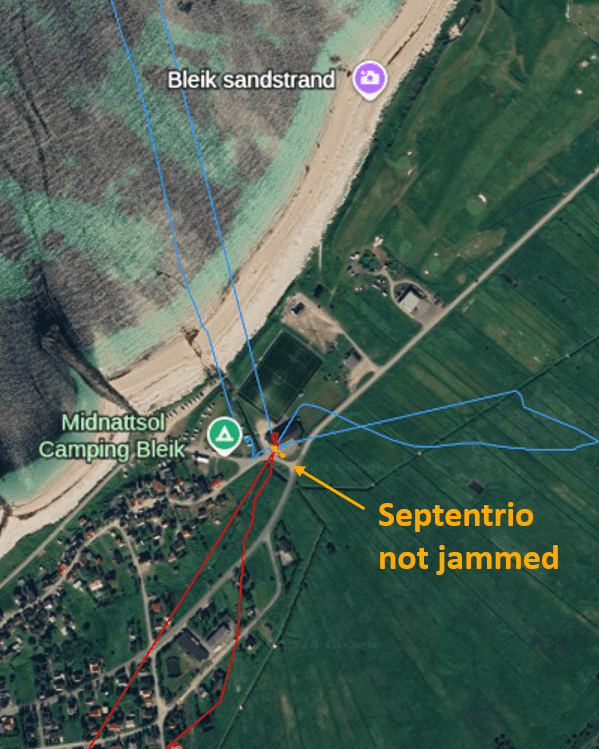
During a five-day event in Norway, Septentrio receivers were tested against multiple competing receivers under various interference scenarios. The graph below shows a static test evaluating multiple receivers under extremely strong interference—signal strength 10 million times that of GNSS signals. The blue and red lines represent two competing receivers, which experienced positioning deviations of hundreds of meters due to interference. In contrast, the Septentrio receiver (orange line) demonstrated exceptional resilience to GPS/GNSS interference. It consistently provided accurate GNSS positioning while actively detecting and flagging interference signals.
In real-world scenarios, loss of GNSS positioning can severely disrupt operations, leading to costly delays, reduced operational efficiency, and reputational damage. For example, an interfered UAV may lose control and crash. Even advanced UAVs equipped with autopilots may enter backup modes such as “hover,” “land,” or “circle,” or switch to alternative sensors like Inertial Navigation Systems (INS). However, without reliable absolute positioning, these sensors are prone to drift over time.
Even in GNSS spoofing attacks, interference is usually first used to break the receiver’s “lock” on GNSS signals to increase the likelihood of spoofed signals being accepted during reacquisition.
Typical Operational Workflow
- Pre-Mission Modeling and Path Planning: Acquire a high-precision 3D model of the building via laser scanning or oblique photography, plan safe and efficient cleaning paths in professional software, and import them into the AG6 ground station.
- On-Site Deployment and Initialization: Set up an RTK base station and power on the UAV. The mosaic-G5 quickly obtains an RTK fixed solution in an open area, and the AG6 completes sensor calibration.
- Automated Cleaning Task Execution: The operator initiates the mission with one click. The UAV autonomously flies to the starting point and accurately performs wall-clinging cleaning based on centimeter-level positioning and heading. The AG6 real-time monitors system status and can transmit operational progress and images via a 4G link.
- Abnormal Handling and Safety Assurance: In case of sustained strong winds or severe signal loss, the AG6 will automatically execute preset safety strategies, such as vertically moving away from the wall to a safe distance or returning along the shortest path.
- Mission Completion and Data Transmission: After cleaning, the UAV automatically returns and lands. Complete flight trajectories, cleaning coverage reports, and system logs are available for download and analysis.

Summary
-Precise Collaboration: The deep integration of the Septentrio mosaic-G5 P3/P3H and AG6 flight control provides building cleaning UAVs with a complete high-precision navigation chain from perception and positioning to control.
-Technological Escort: Leveraging Septentrio’s proprietary GNSS+ technologies such as AIM+, APME+, and LOCK+, it effectively overcomes challenges of interference, multipath, and dynamic stress in high-altitude urban operations.
-Highlighted Value: Realizes automation, high precision, and unmanned operation of high-altitude cleaning tasks, significantly improving operational safety, efficiency, and cleaning quality while reducing overall operational costs.
-Easy Implementation: Modular design, open interfaces, and detailed documentation support enable rapid and stable integration of this high-performance solution into various professional cleaning UAV platforms.

Targeted Q&A
Q: In cost-sensitive projects, can the single-antenna mosaic-G5 P3 version be used?
A: Yes, but its application scenarios are limited. The P3 version delivers the same centimeter-level positioning performance as the P3H, making it suitable for cleaning tasks involving relatively regular building facades where the UAV primarily flies in vertical or horizontal straight lines. For tasks involving curved facades, corners, or complex paths requiring extremely high heading accuracy, the dual-antenna heading function of the P3H version is crucial for improving safety and efficiency, making it the better choice.
Q: How does the AG6 flight control fuse data from the mosaic-G5 and its own IMU?
A: The AG6 adopts an advanced multi-sensor fusion algorithm. It uses the centimeter-level position, velocity, and heading information provided by the mosaic-G5 as a high-weight, low-frequency “absolute reference.” Meanwhile, the AG6’s built-in high-performance IMU provides high-frequency (typically hundreds of hertz) angular velocity and acceleration data. The fusion algorithm uses GNSS data as an anchor to real-time correct drift that may occur from IMU integration, outputting a combined navigation solution that is both high-frequency and long-term stable, achieving optimal control results.
Q: How to achieve centimeter-level cleaning in urban areas without a fixed base station network?
A: Two modes are available: Network RTK (NRTK) or Post-Processed Kinematic (PPK).
NRTK: Access local CORS services via 4G/5G networks to obtain differential correction data, enabling real-time centimeter-level positioning.
PPK: During flight, the mosaic-G5 and ground base station simultaneously record raw observation data. After the mission, professional software performs post-processing on the observation data from both the base and rover stations, resolving a centimeter-level precise flight trajectory that is then matched with cleaning records. The PPK mode does not rely on real-time data links and is more robust in signal-blocked areas.
Q: How does the system perform in strong winds?
A: The system’s advantages are particularly evident in strong winds. The high-frequency, high-precision position feedback provided by the mosaic-G5 allows the AG6 flight control to quickly detect when the UAV is blown off the planned path and generate strong, precise control commands for compensation in a timely manner. Meanwhile, the stable heading provided by the P3H ensures the UAV does not deflect into the wall due to wind. The entire system forms a high-speed closed loop, delivering wind resistance far superior to traditional solutions relying on low-precision GNSS.






