Standard GNSS receivers provide position — latitude, longitude, and altitude. But for autonomous UAV operations, knowing exactly where you are is only half the equation. Knowing which direction you’re facing and how the platform is oriented — heading, pitch, and roll — is critical for safe and precise flight, especially in GNSS-denied or dynamically challenging environments.
In this article, we explore how dual-antenna RTK GNSS solutions deliver centimetre-level heading and attitude determination for UAVs, why this matters for professional drone operations, and how Septentrio’s multi-antenna GNSS technology stacks up against traditional magnetic compass and INS-based approaches.
Why Heading and Attitude Matter for UAVs
A UAV’s flight controller relies on knowing the aircraft’s orientation to maintain stability, execute precise manoeuvres, and navigate accurately. Traditionally, drones use a combination of GPS for position, a magnetometer (digital compass) for heading, and an inertial measurement unit (IMU) for attitude. However, each of these sensors has significant limitations in real-world B2B operations:
- Magnetometers are vulnerable to interference — electrical noise from motors, ESCs, and wiring causes heading drift, especially on larger UAV platforms.
- IMUs drift over time — without frequent corrections, gyroscopes and accelerometers accumulate error, requiring regular GPS-based updates.
- Single-antenna GPS can’t resolve heading — a standard single-antenna receiver gives velocity-based course over ground (COG), not true heading. This fails at low speeds or hover.
Dual-antenna RTK GNSS solves all three problems simultaneously.
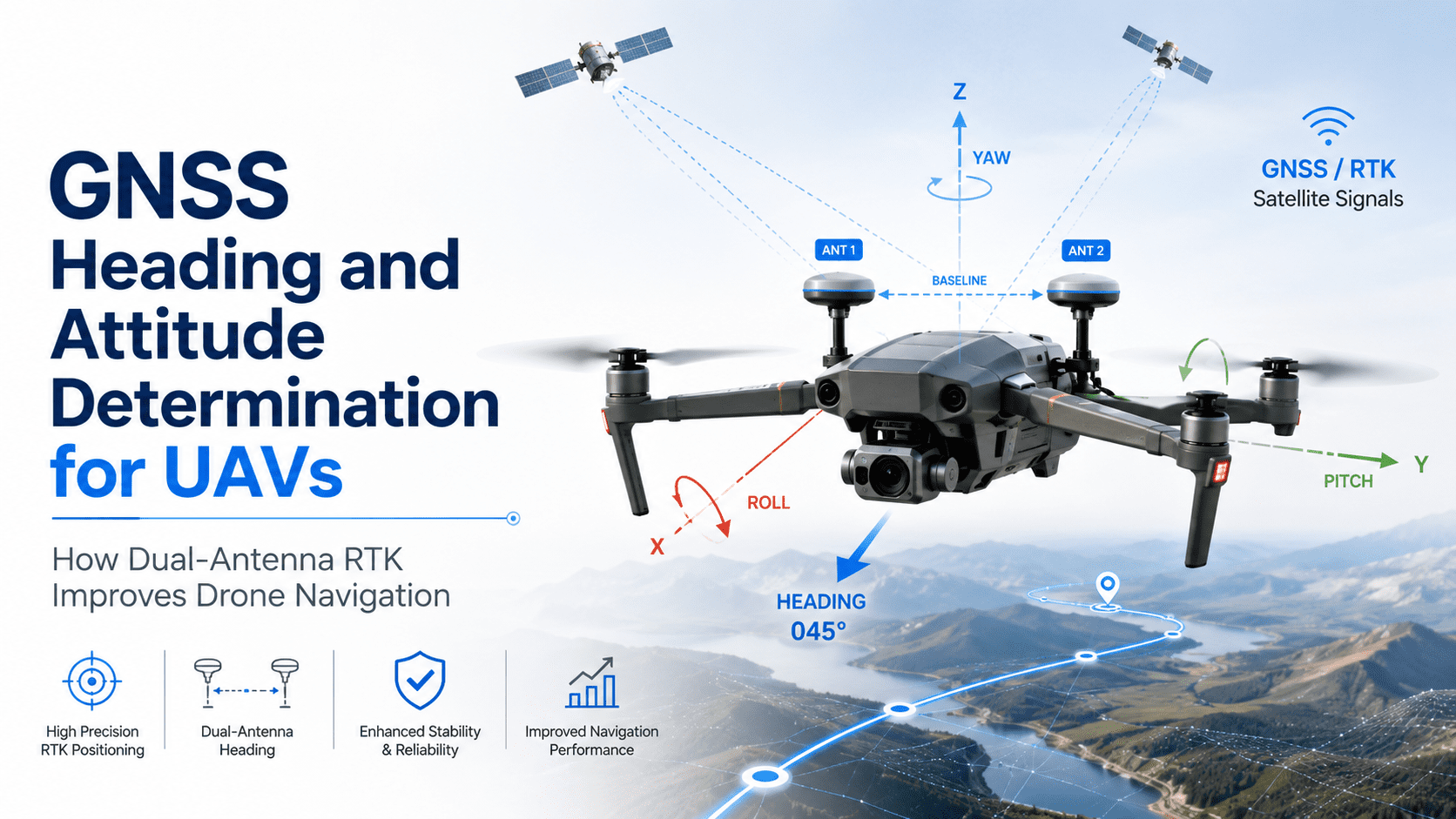
How Dual-Antenna GNSS Heading Works
A dual-antenna GNSS receiver uses two physically separated antennas mounted on the UAV — typically along the longitudinal axis (front-to-back) or laterally. By measuring the carrier phase difference between the two antennas, the receiver computes the baseline vector between them with centimetre-level precision.
This baseline vector directly gives:
- Heading (yaw) — the direction the baseline points, typically aligned with the aircraft nose.
- Pitch — the vertical angle of the baseline, giving fore-aft tilt.
- Roll (with three or more antennas) — lateral tilt, achievable with three-antenna setups.
The key advantage is that heading is derived purely from GNSS carrier-phase observations — no magnetic compass, no calibration, no drift. As long as both antennas have a clear view of the sky, heading accuracy of 0.1–0.3 degrees RMS is achievable with a 1-metre antenna separation, even in static conditions.
Septentrio’s Multi-Antenna GNSS Technology
Septentrio is one of the few GNSS receiver manufacturers offering native multi-antenna support in compact, low-power modules suitable for UAV integration. The mosaic-X5 and mosaic-H modules both support dual-antenna heading with the company’s advanced AIM+ interference mitigation technology.
Key features of Septentrio’s multi-antenna implementation include:
- Dual-antenna heading with single module — no need for two separate receivers. The mosaic-X5 handles both antennas natively.
- RTK corrections for both antennas — each antenna gets RTK-level positioning, giving both accurate position AND precise heading simultaneously.
- AIM+ anti-jamming and anti-spoofing — heading remains reliable even in RF-contested environments, critical for security and government UAV applications.
- Low power consumption — both modules consume under 1.5W, suitable for battery-powered drone operations.
For UAV manufacturers building survey-grade, autonomous, or mission-critical platforms, this means a single GNSS module can replace the traditional magnetometer + IMU fusion setup with a purely GNSS-based heading solution that doesn’t degrade over time.
Use Cases for Dual-Antenna GNSS Heading
1. Precision Survey and Mapping
When a UAV is capturing georeferenced imagery or LiDAR data, knowing the exact heading and attitude of the platform at the instant of capture is essential for accurate orthorectification and point cloud alignment. Dual-antenna GNSS heading eliminates the uncertainty from magnetic compass-based yaw, improving GCP-free accuracy from metre-level to centimetre-level.
2. Autonomous Navigation and BVLOS Operations
Beyond visual line of sight (BVLOS) operations require robust navigation that doesn’t rely on visual cues or magnetic sensors. Dual-antenna GNSS provides a hard-reckoned heading that remains accurate indefinitely, making it ideal for long-range autonomous flights over water, forests, or featureless terrain where visual odometry fails.
3. Marine and Waterway Inspection
Drones operating over water face severe magnetic interference — the water surface acts as a conductor, and reflected GNSS signals further degrade standard positioning. Dual-antenna heading is immune to these effects, making it the preferred solution for maritime UAV operations, including ship-to-shore inspection, oil spill monitoring, and fisheries surveillance.
4. Government and Security UAVs
In contested electromagnetic environments, magnetometers are easily spoofed or jammed. Dual-antenna GNSS heading provides a jam-resistant orientation source that, combined with GNSS receivers featuring AIM+ anti-jamming, maintains accurate navigation even under active jamming. This is a critical requirement for defence-grade UAV platforms.
Practical Integration: What You Need
Integrating dual-antenna GNSS heading into a UAV platform requires three components:
The Septentrio mosaic-X5 outputs heading data directly via standard NMEA sentences (e.g., $PASHR, $PSAT) or SBF binary format, which most professional flight controllers can parse natively. This makes integration straightforward for drone manufacturers already experienced with Septentrio OEM modules.
Dual-Antenna vs Traditional Heading: A Comparison
| Parameter | Magnetometer | Single-Antenna GNSS (COG) | Dual-Antenna GNSS |
|---|---|---|---|
| Heading accuracy | 1–5° (variable) | 2–10° (high speed only) | 0.1–0.3° |
| Works at hover | Yes | No | Yes |
| Interference prone | Yes (EMI, metal) | No | No |
| Drift over time | Yes (hard iron, soft iron) | No | No |
| Requires calibration | Yes (frequent) | No | No |
| Works in GNSS-denied | Yes | No | No |
| Cost delta | Low | None (included) | Moderate (2 x antenna) |
As the table shows, dual-antenna GNSS wins on accuracy, reliability, and maintenance — the only trade-off is the need for two antennas and a clear sky view. For professional B2B UAV operations, the benefits far outweigh the costs.
Frequently Asked Questions
What is dual-antenna GNSS heading?
Dual-antenna GNSS heading is a technique where two GNSS antennas mounted at known positions on a platform measure carrier-phase differences to compute the baseline vector between them. This yields highly accurate heading (yaw) and pitch information without relying on magnetic sensors.
How accurate is dual-antenna GNSS heading for UAVs?
With a 1-metre antenna separation, dual-antenna GNSS can achieve 0.1–0.3 degrees RMS heading accuracy. The accuracy improves with longer baselines and decreases with shorter separations. When combined with RTK corrections, the heading remains stable even under dynamic movement.
Can I use dual-antenna GNSS with PX4 or ArduPilot?
Yes. Both PX4 and ArduPilot support external heading input from GNSS receivers. The Septentrio mosaic-X5 outputs heading data in standard formats that integrate directly with these flight controllers, allowing the autopilot to bypass the internal magnetometer and use GNSS-based heading for all navigation decisions.
Does dual-antenna GNSS work when the UAV is stationary or hovering?
Yes — unlike velocity-based course over ground (COG) from a single-antenna receiver, dual-antenna GNSS resolves heading instantaneously from carrier-phase differences. It works at zero velocity, which is critical for hover-stabilised flight and precision take-off/landing operations.