
How UAV Swarms Redefine the Rules of the Next-Generation Battlefield
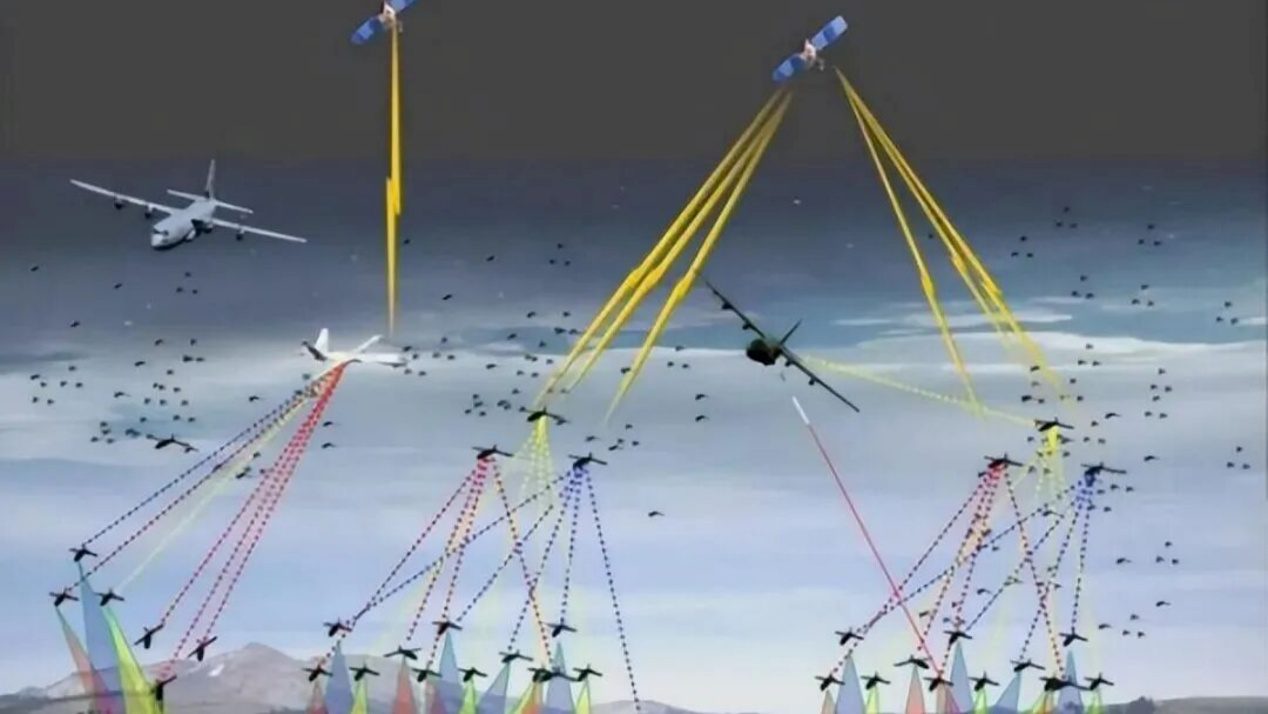
The decisive factor of the future battlefield lies no longer in the prowess of a single weapon, but in the collaborative resonance of the entire intelligent network. As UAV swarms think autonomously, restructure dynamically and launch saturation assaults like living organisms, warfare is entering a new era of “intelligent surge” from “precision targeted strikes”. We are moving toward a future where hundreds of low-cost UAVs share situational awareness in real time through self-organizing networks, and conduct collaborative detection, jamming, assault and assessment with a decentralized architecture.
They are no longer mere weapon carriers, but a distributed, renewable and highly adaptive battlefield organism:
Quantity as both shield and spear: Leveraging overwhelming numerical superiority to form a multi-dimensional, uninterrupted wave of saturation attacks, which greatly dilutes the effectiveness of the enemy’s traditional air defense systems and achieves asymmetric attrition.
Decentralized survival: With no single node vulnerable to a “decapitation strike”, the swarm self-repairs and restructures its formation dynamically, maintaining the resilience and sustainability of overall combat capability.
Autonomous collaborative intelligence: Through bionic swarm algorithms, individual UAVs make autonomous decisions and coordinate with each other to execute complex tactical maneuvers—realizing the organic integration of penetration, reconnaissance, electronic warfare and fire distribution.
Low cost reshaping the cost equation: Ultra-cost-effective swarm units force the opponent to deploy disproportionately valuable high-end resources for response, thus crippling their combat system at the strategic level.
This is not just an upgrade of equipment, but a fundamental shift in combat philosophy: from pursuing advanced platforms to pursuing network intelligence; from relying on centralized command to stimulating swarm autonomy; from focusing on destruction to focusing on paralysis, attrition and system suppression. Embracing the swarm era means embracing new-quality combat capability centered on distributed intelligence, adaptive collaboration and low-cost scale-up. Whoever first builds and masters this intelligent swarm network will seize the rhythm and the right to define the future battlefield.
Future Challenges of UAV Swarm Combat and Core Bottlenecks in Navigation and Positioning
UAV swarm combat is reshaping the rules of modern warfare with five revolutionary application scenarios: wide-area intelligent reconnaissance for full-domain situational awareness, collaborative precision strikes for a “find-and-destroy” kill chain, swarm saturation assaults for breaking through traditional defense systems, flexible information relay for ensuring communication in complex environments, and agile terminal logistics for reconstructing the logistics support network. From the Russia-Ukraine battlefield to future concepts, swarm combat has evolved from a supporting force to a decisive combat system.
However, as combat modes advance toward actual combat, challenges in four dimensions have become key bottlenecks restricting its effectiveness:
Swarm Confrontation Spawning a New Game Field
The future battlefield will enter an era of “swarm vs. swarm” offense and defense. Achieving effective identification, jamming and countermeasures against enemy swarms in complex electromagnetic environments while ensuring the operational integrity of one’s own swarms has become an urgent offense and defense challenge to be addressed.
Intelligent Collaboration Facing Dual Boundaries
Real-time task allocation and dynamic collaboration of large-scale swarms place extreme computing demands on artificial intelligence algorithms; moreover, achieving autonomous decision-making under the premise of ensuring effective human control faces dual tests of ethical norms and technical implementation.
Communication Systems Under Extreme Pressure
Real-time transmission of massive sensor data, collaborative commands and status information poses near-limit system pressure on communication bandwidth, anti-jamming capability and dynamic network topology management.
Barriers to Flight Control System Integration
In-depth integration of mainstream open-source flight control platforms (e.g., PX4, ArduPilot) with military swarm systems faces multiple challenges:
Real-time and determinism bottlenecks: Civilian architectures struggle to meet the millisecond-level response and high reliability requirements in high-intensity confrontation environments.
Limitations in swarm collaboration expansion: Existing task scheduling and formation management architectures lack underlying support for large-scale swarm collaboration.
Security hardening challenges: The open-source code base requires comprehensive security hardening and anti-attack reinforcement.
Dilemma of military standard compatibility: There are technical gaps in protocol adaptation and in-depth integration with existing command and control, data link systems.
The evolution of UAV swarm combat is an all-round competition covering intelligent algorithms, collaborative networks, navigation resilience and system integration. Only by making breakthroughs in these basic fields can one truly grasp the winning right in future swarm confrontation—navigation shapes the future, and collaboration determines the outcome.

Navigation as the Lifeline: In-Depth Analysis of GNSS Vulnerabilities in UAV Swarm Combat
UAV swarm combat is facing a cruel reality: its reliance on GNSS (Global Navigation Satellite System) navigation and positioning capability has become the most vulnerable and easily attacked “Achilles’ heel” of the system. On the future battlefield of high-intensity confrontation, GNSS challenges are far more than technical flaws, but strategic risks related to the survival of swarms.
Crisis of “Blindness” and “Misguidance” in Confrontational Environments
Signal denial (suppressive jamming) – “Battlefield black barrier”
Mechanism: The enemy floods weak GNSS satellite signals by transmitting high-power radio noise, making it impossible for receivers to acquire and track signals.
Impact: The swarm instantly loses the absolute position, velocity and time (PVT) reference. Under a decentralized architecture, UAVs lacking a unified spatiotemporal reference cannot maintain formation, execute collaborative routes or conduct precise target allocation. The “ordered collaboration” of the entire swarm degenerates into “disordered turbulence”, and combat effectiveness drops to zero.
Pervasiveness: Portable, vehicle-mounted and airborne GNSS jammers have been widely proliferated. In future high-intensity confrontations, the combat airspace will be in a “GNSS-denied environment” for a long time.
Signal spoofing (inductive jamming) – “Digital puppet”
Mechanism: The enemy transmits counterfeit signals with a structure similar to real GNSS signals but carrying wrong navigation information, inducing receivers to calculate incorrect positions and times.
Impact: More lethal than denial. The swarm may be entirely “misguided” to a preset ambush airspace or wrong route without any alarm, or even cause internal collisions. More alarmingly, damaged time synchronization will directly lead to disordered collaborative strike commands, and may even induce attacks on one’s own targets.
Stealthiness: Low-power, progressive spoofing methods are difficult to be identified in real time by traditional receivers, posing an enormous threat.
“Precision Limit” Bottleneck in High-Dynamic Collaboration
The intelligence of swarms is not an abstract concept, but is built on the physical cornerstones of nanosecond-level time synchronization and centimeter-level relative positioning. GNSS is facing extreme tests here:
“Microsecond gap” in time synchronizationDemand: Distributed collaborative decision-making, communication scheduling, electronic warfare beam coordination, etc., require hundreds of nodes in the swarm to maintain absolute time synchronization (usually better than 100 nanoseconds).GNSS Limitation: The timing accuracy of ordinary GNSS receivers is at the tens of nanosecond level, but under high-maneuver (high acceleration, high angular velocity) conditions, the tracking pressure on the signal carrier phase and code loop surges, leading to easy loss of lock, a sharp drop in synchronization accuracy or even interruption. A single violent evasive maneuver is enough to destroy the precise collaborative timing.
“Dynamic attenuation” in relative positioningDemand: Dense formation flight, collision avoidance, collaborative payload imaging (e.g., radar interferometry), etc., require UAVs to know each other’s precise relative positions (centimeter to decimeter level) in real time.GNSS Limitation: High precision can be achieved by relying on carrier phase differential (RTK/PPP-RTK) technology, but it has a long initialization time. Moreover, in dynamic environments, the resolution of the “integer ambiguity” is highly susceptible to satellite signal occlusion, multipath and maneuver, leading to a sharp drop in accuracy from centimeter level to meter level, which cannot meet the needs of close collaboration.
“Signal Desert” Dilemma in Complex Environments
Even in non-confrontational environments, the inherent defects of GNSS in complex physical environments seriously restrict the applicable boundaries of swarm combat:
Urban canyons, indoor/underground: Severe occlusion and reflection of signals by buildings lead to insufficient number of visible satellites, rampant multipath effects (signals arriving with delay after reflection), drastic jumps in positioning results and extremely low reliability.
Dense forest areas and canyons: Signal attenuation and intermittence caused by crown and terrain occlusion may result in frequent positioning loss of the swarm in critical low-altitude penetration and mountain warfare.
Low-altitude and ground clutter: For UAVs in low-altitude flight or take-off and landing phases, multipath interference caused by ground reflection is particularly serious.
The stability of navigation determines the survivability of swarms, the precision of navigation determines the sharpness of collaboration, and the resilience of navigation determines the invulnerability of the entire combat system. For UAV swarms, addressing GNSS challenges is not only a technical task, but also a strategic investment to redefine the rules of future air combat. Whoever masters the ability to conduct collaborative operations in denied environments will seize the initiative in future swarm warfare.
Empowering Swarms with Anti-Jamming Spatiotemporal Reference: Septentrio Mosaic-G5 P3H Navigation Core Solution
Facing the GNSS survival crisis of “blindness, misguidance and precision loss” in future UAV swarm combat, the intelligent collaboration of swarms requires a spatiotemporal core that is always stable, precise and reliable in confrontational environments. The Septentrio Mosaic-G5 P3H high-precision GNSS heading receiver module is a new-generation solution built for this critical mission.
Confronting Jamming and Spoofing: Building an Impregnable First Line of Defense with AIM+
In the future battlefield, the GNSS “denied environment” will become the norm. Targeting the “battlefield black barrier” caused by suppressive jamming and the “digital puppet” created by inductive spoofing, the AIM+ (Advanced Interference Mitigation and Monitoring) technology built into the Mosaic-G5 P3H provides a systematic defense:
Adaptive notch filtering: Automatically identifies and suppresses continuous wave and narrowband interference to ensure that key satellite signals are not submerged.
Pulse blanking technology: Effectively filters instantaneous high-intensity pulse interference and maintains the continuity of signal tracking.
Wideband interference mitigation unit: Even for the most difficult-to-combat “frequency-sweeping” interference signals, it can significantly reduce their influence range, compressing the effective interference area from hundreds of meters to a few meters, and ensuring the normal operation of the swarm in most mission airspaces.
Integrated spectrum analyzer: Visualizes the RF environment in real time, quickly locates jamming sources, and provides critical spectrum intelligence for tactical decision-making.
Supporting High-Dynamic Collaboration: Breaking Through Precision Limits with Multi-Frequency Redundancy and Advanced Algorithms
The close formation, collision avoidance and collaborative strikes of UAV swarms rely on nanosecond-level time synchronization and centimeter-level relative positioning. The Mosaic-G5 P3H ensures extreme precision through the following designs:
Full-constellation four-frequency tracking: Supports four-frequency signals of four major systems (GPS/QZSS, BeiDou, GALILEO, GLONASS) in single-antenna mode. Even if some frequencies are subject to jamming or occlusion, signal redundancy from other frequencies and constellations can ensure continuous high-precision solution and protect the collaborative reference from being lost.
Industry-leading RTK performance: Delivers continuous and reliable centimeter-level positioning accuracy, laying a foundation for the swarm to implement precise formation flight and target strikes.
Dual-antenna heading (P3H model): While providing high-precision position, it directly outputs precise heading, pitch or roll angle information, meeting the stringent requirements of autonomous navigation systems for full attitude perception and enabling more intelligent maneuver and collaboration.
APME+ anti-multipath technology: Effectively suppresses signal reflection interference in complex environments such as urban canyons and mountainous areas, ensuring the reliability and accuracy of positioning results in challenging terrains.
LOCK+ technology: Automatically adapts to severe vibration and impact caused by high-maneuver flight of UAVs, maintains a stable satellite signal tracking loop, and prevents loss of lock under high-G maneuver.
Built for Swarms: Ultra-Low Power Consumption and Easy Integration Enabling Large-Scale Deployment
The scale advantage of swarms is built on each low-cost and highly reliable unit. The Mosaic-G5 P3H features an ultra-compact size (22.8 x 16.4 mm), light weight (2.2 grams) and industry-leading ultra-low power consumption design, enabling seamless integration into various miniaturized UAV platforms without affecting their endurance and payload capacity. Its design is compatible with automated assembly and supports convenient integration with mainstream open-source flight controls (e.g., PX4, ArduPilot), greatly reducing the technical threshold and cost of large-scale deployment.
Septentrio Mosaic-G5 P3H – Building a Seamless, Anti-Jamming Navigation Foundation for Swarm Combat
As UAV swarm combat evolves from a technical concept to the core of actual combat, the bottleneck of its combat effectiveness is shifting from “whether collaboration is possible” to “how to integrate and collaborate reliably and seamlessly”. Facing “swarm vs. swarm” confrontation, extreme communication pressure and stringent autonomous decision-making requirements, the underlying navigation system of swarms not only needs extraordinary performance, but also must have the ability of in-depth and stable integration with combat systems. The Septentrio Mosaic-G5 P3H high-precision GNSS heading receiver module is not just a navigation sensor, but a battle-proven, out-of-the-box swarm navigation integration solution that directly addresses the above core challenges.
We provide a “system connection key” that crosses barriers:
Plug-and-play physical integration: Offers prefabricated cables (e.g., CBL_UAS_44) specially designed for standard hardware such as Pixhawk, with built-in level conversion and precise pin mapping, eliminating connection errors and equipment damage and achieving “zero-risk” docking at the hardware level.
Seamless parsing of native protocols: Ardupilot firmware natively supports the Septentrio SBF protocol. By setting just one parameter (e.g., GPS_TYPE2 = 10), the flight control system can directly obtain centimeter-level positioning and true GNSS heading, eliminating the need to write underlying parsing code at all and solving the underlying problem of protocol compatibility.
Validated “golden parameter set”: For advanced functions such as dual-antenna heading, we provide a complete parameter configuration template including EKF3 fusion algorithm and lever arm compensation. This greatly reduces the complexity and risk of system tuning and ensures that the integrated system is in optimal working condition immediately.
Optimized data flow for real-time performance: Pre-configured 10Hz high-frequency output combined with refined SBF data blocks ensures that the data flow is synchronized with the real-time control loop of the flight control system while providing rich navigation information, meeting the control requirements of high-dynamic swarms.
Summary
Choosing the Septentrio Mosaic-G5 P3H means choosing not just a module, but a technology solution package including dedicated hardware, deterministic configuration, anti-jamming core and comprehensive support. It allows UAV swarm developers to cross complex integration barriers and focus their efforts on the development of upper-layer swarm intelligence and tactical algorithms, thus rapidly and reliably building an intelligent swarm system capable of maintaining collaborative combat capability in future high-intensity confrontations. Built for swarms, optimized for integration. The Septentrio Mosaic-G5 P3H is an indispensable navigation core for building the next generation of credible and reliable UAV swarm combat systems.
How does the Mosaic-G5 P3H simplify the integration of professional high-precision GNSS receivers into UAV flight control systems for fast and reliable deployment, given the complex challenges in interfaces, protocols and configuration?
It provides a complete out-of-the-box integration solution that directly addresses integration pain points:
Worry-free hardware connection: Offers prefabricated dedicated cables (e.g., CBL_UAS_44) designed for standard flight controls such as Pixhawk, with built-in correct level conversion and pin mapping for “plug-and-play” operation, completely avoiding the risk of equipment damage caused by wiring errors.
Native software protocol compatibility: Mainstream open-source flight controls (e.g., Ardupilot) have a native built-in parser for its SBF protocol. Users only need to set the flight control parameter GPS_TYPE2=10 (SBF) or 26 (SBF-Heading) to directly obtain position and heading data without writing any underlying parsing code.
Simplified configuration and tuning: Provides a “golden parameter set” and detailed guidelines including flight control parameters (e.g., EKF3 fusion settings, lever arm compensation) and receiver output data block configuration. This greatly reduces the complexity and technical threshold of system tuning and ensures that the integrated system can quickly reach the optimal working state.
Real-time performance optimization: The combination of pre-configured 10Hz high-frequency output and refined necessary data blocks meets the real-time requirements of high-dynamic control while avoiding data flow congestion. Its low and predictable latency characteristics are critical for a stable flight control system.
How does the Mosaic-G5 P3H ensure reliable operation in areas with severe signal occlusion or dense interference (e.g., cities, mountainous areas) where UAV swarms need to conduct operations in complex electromagnetic and geographic environments?
Its design fundamentally improves robustness in challenging environments:
Enhanced signal availability: The multi-constellation and multi-frequency receiving strategy greatly increases the number of visible satellites when the sky is partially occluded by buildings or terrain, improving availability from the source of signals.
Active signal purification: APME+ advanced multipath mitigation technology can effectively separate direct and reflected signals, greatly reducing positioning jumps and errors caused by building reflections in cities and ensuring the reliability of positioning results.
Powerful anti-jamming foundation: As mentioned above, AIM+ technology provides comprehensive anti-jamming capability from narrowband to wideband, ensuring that the receiver can still lock and utilize uncorrupted pure signals in urban areas with complex electromagnetic environments or areas close to jamming sources.
In the fiercely confrontational battlefield environment, GNSS signals are highly susceptible to jamming and spoofing. How does the Septentrio Mosaic-G5 P3H ensure that UAV swarms do not become “blind” or “misguided”?
The core lies in the built-in AIM+ (Advanced Interference Mitigation and Spoofing Protection) technology, a systematic defense solution:
Countering suppressive jamming (“blindness”): Automatically identifies and filters narrowband continuous wave interference through adaptive notch filtering; its wideband interference mitigation unit (WIMU) can effectively counter complex frequency-sweeping jamming, and field tests show that it can compress the influence range of a 10mW jamming source from hundreds of meters to a few meters, ensuring that the swarm maintains navigation capability in most mission airspaces.
Countering inductive spoofing (“misguidance”): Integrates heuristic algorithms based on multi-frequency signal consistency verification, signal quality monitoring and cryptographic authentication (e.g., support for Galileo OSNMA). It can identify and mark fake signals at the signal level, issue alerts through the “authentic spoofing identification” alarm system, and automatically eliminate corrupted signals while switching to other unjammed satellite frequencies and constellations for positioning, eliminating the risk of being controlled as a “digital puppet” from the source.






