If you fly drones professionally — whether for mapping, survey, inspection, or autonomous operations — you already know your GNSS receiver is the backbone of your positioning system. But here’s something many operators overlook: the firmware running on that receiver is just as important as the hardware itself.
Firmware updates for GNSS receivers aren’t just bug fixes. They can unlock new satellite constellations, improve RTK convergence times, patch security vulnerabilities, add support for new correction services, and even improve centimeter-level accuracy in challenging environments. For a professional UAV operator, keeping firmware current can mean the difference between a mission that converges in 30 seconds versus one that takes two minutes — or worse, fails altogether.
In this guide, we’ll break down exactly what GNSS receiver firmware does, how updates impact real-world drone performance, and how to manage firmware on Septentrio-powered receivers like the HB21 and EV322.
What GNSS Receiver Firmware Actually Controls
Modern multi-band, multi-constellation GNSS receivers are essentially specialized computers. The firmware is the operating system that determines how the receiver processes satellite signals, applies corrections, and outputs position data. It touches every aspect of receiver behavior.
Signal Processing and Tracking Loops
The firmware governs how the receiver’s correlators acquire and track satellite signals. This includes the bandwidth of tracking loops, carrier phase tracking strategies, and how the receiver handles multipath mitigation. A firmware revision can, for example, improve tracking sensitivity for weak signals by 3–5 dB, which directly translates to better performance under tree canopy or in urban canyons.
Constellation and Frequency Support
GNSS constellations evolve constantly. GPS Block III satellites broadcast new L1C signals. Galileo has transitioned from initial services to full operational capability. BeiDou continues expanding. GLONASS modernizes. QZSS adds new satellites. When a new signal becomes available, you need a firmware update to use it. Without current firmware, your receiver may be flying blind to half the satellites overhead.
RTK and Correction Engine
The RTK engine that computes centimeter-level positions is implemented in firmware. Updates can improve ambiguity resolution algorithms, reduce Time-To-First-Fix (TTFF), and add support for new correction formats like RTCM 3.3 or Galileo HAS. Some firmware updates have been shown to cut RTK convergence time by 40–60% in challenging conditions.
Security and Anti-Spoofing
As GPS jamming and spoofing become more common, firmware updates deliver critical security patches. AIM+ anti-jamming technology, TESEO anti-spoofing, and other security features are all firmware-implemented. An outdated receiver is a vulnerable receiver.
Real Performance Gains from Firmware Updates
Let’s look at measurable improvements that firmware updates can deliver.
| Performance Metric | Before Firmware Update | After Firmware Update | Improvement |
|---|---|---|---|
| RTK convergence time (open sky) | 25–40 seconds | 10–20 seconds | ~50% faster |
| RTK convergence time (partial canopy) | 90–180 seconds | 30–60 seconds | ~65% faster |
| Satellites tracked (GPS + Galileo + BeiDou) | 18–22 | 28–35 | +40–60% |
| Signal sensitivity (acquisition threshold) | −145 dBm | −148 dBm | +3 dB improvement |
| Multipath rejection in urban environments | Standard correlator | Enhanced strobe correlator | 5–10 cm less noise |
| Anti-spoofing detection rate | Basic signal check | TESEO+ AIM+ integration | Near 100% detection |
These are not theoretical numbers. Septentrio published firmware revision notes showing exactly these kinds of improvements from major version bumps on the mosaic-X5 and AsteRx platforms.
Key Firmware Features for Drone Operations
When evaluating a firmware version for your GNSS receiver, these are the features that matter most for UAV applications.
Multi-Constellation, Multi-Frequency Tracking
Modern firmware supports GPS L1/L2/L5, Galileo E1/E5a/E5b, BeiDou B1I/B2I/B1C/B2a, GLONASS L1/L2, and QZSS L1/L2/L5. Each additional frequency and constellation gives your drone more satellites to work with, especially in environments where some signals are blocked or degraded. A firmware update that adds BeiDou B1C support, for example, can add 5–10 more usable satellites in Asian operating theaters.
RTK Fixed Ambiguity Resolution
The algorithms that resolve carrier-phase integer ambiguities are constantly improving. Newer firmware uses advanced search strategies and better atmospheric modeling to achieve RTK fix status faster and maintain it under more challenging conditions. For drone surveyors, every second of convergence time saved is money in the bank.
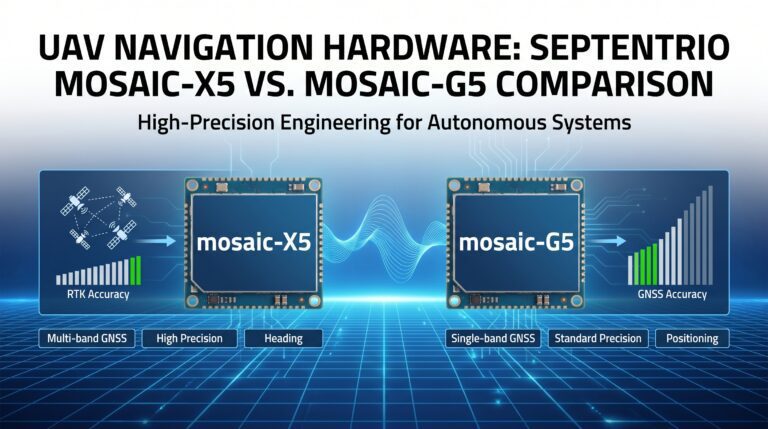
Heading and Dual-Antenna Support
Receivers like the mosaic-G5 support dual-antenna heading, but the firmware implementation determines how quickly and accurately heading is computed. Firmware updates can improve heading accuracy from 0.3° to 0.2° RMS at 1-meter baseline, and reduce heading convergence time from 30 seconds to under 10.
IMU Integration and Sensor Fusion
Many Septentrio receivers support internal IMU sensor fusion. The firmware manages the tight coupling between GNSS and inertial measurements, enabling continued position output during brief GNSS outages. Each firmware generation improves the sensor fusion algorithms, extending bridge time and reducing position drift during dropout periods.
Logging and Output Formats
Firmware controls what data formats the receiver outputs — NMEA, SBF (Septentrio Binary Format), RTCM, and more. Updates may add new message types, higher output rates (50 Hz vs 20 Hz, for example), or improved support for specific autopilots like ArduPilot or PX4.
How to Update Firmware on Septentrio-Powered Receivers
Updating firmware on a Septentrio-based GNSS receiver is straightforward, but there are important steps to follow.
Step 1: Identify Your Current Firmware Version
Connect to your receiver via the web interface or RxControl software. Navigate to the system information page to see the current firmware version string. Note it down — you’ll want to compare against the latest available version.
Step 2: Download the Latest Firmware
Septentrio publishes firmware updates on their official support portal. The files typically come as .sbp (Septentrio Boot Package) files. Make sure you download the correct variant for your receiver model — firmware for the mosaic-X5 is not interchangeable with mosaic-G5 firmware, for example.
Step 3: Connect and Upload
Using RxControl or the web UI:
- Connect to your receiver via USB, Ethernet, or Wi-Fi
- Navigate to the firmware update page
- Select the downloaded .sbp file
- Click upload and confirm
The update typically takes 3–5 minutes. The receiver will reboot automatically. Do NOT power off the receiver during this process.
Step 4: Verify and Reconfigure
After reboot, verify the new firmware version is active. Reset your configuration files or re-upload saved settings. Some parameters may have changed between firmware versions, so review settings carefully. Test the receiver’s performance in a known location before deploying it on a mission.
Risks of Running Outdated Firmware
Missed Satellite Support
The most immediate consequence of outdated firmware is missing satellite signals. GPS L5, Galileo E5b, and BeiDou B1C are relatively new additions. If your receiver’s firmware predates support for these signals, you’re losing 15–25% of available satellites, which directly degrades RTK reliability and accuracy.
Security Vulnerabilities
Spoofing and jamming threats evolve continuously. GNSS receivers with outdated firmware lack the latest TESEO anti-spoofing heuristics and AIM+ anti-jamming algorithms. For drone operators flying in contested environments or near critical infrastructure, this is a material risk.
Compatibility Issues
New versions of ground control software, autopilots, and base station equipment often require specific firmware features. Running old firmware can cause unexpected incompatibilities — your receiver may stop outputting the exact NMEA sentences your flight controller expects, or may not support the RTCM 3.3 correction format your base station broadcasts.
Firmware Update Best Practices for UAV Operators
Test Before Deploying
Never update firmware in the field right before a mission. Update in the workshop, verify operation, and run a static survey test to confirm RTK performance is as expected. Keep a log of which firmware version is running on each receiver in your fleet.
Backup Configuration Files
Before updating, export your receiver’s full configuration. Septentrio RxControl allows you to save a complete configuration file. If the update resets settings to factory defaults, you can restore your setup in seconds rather than reconfiguring from scratch. Configuration files are small and should be version-controlled alongside your firmware records.
Maintain a Rollback Plan
Keep the previous firmware version file accessible. While major issues are rare, having the ability to downgrade ensures you’re never stuck with incompatible firmware on a mission-critical receiver.
Subscribe to Release Notifications
Septentrio and its distribution partners (including UAV GNSS) announce firmware releases. Subscribe to notifications so you know when important updates drop. Critical security patches naturally warrant faster action than feature releases.
Related GNSS Products
- HB21 GNSS Box Receiver — All-in-one RTK receiver with 4G LTE, heading, and data logging
- HB6 GNSS Box Receiver — Compact RTK receiver powered by Septentrio Mosaic X5
- EV322 GNSS Receiver — Lightweight RTK receiver for UAVs and autonomous systems
- AIM+ Anti-Jamming Technology — Military-grade interference and spoofing protection
Browse our full GNSS receiver collection for professional UAV applications.
Frequently Asked Questions
How often should I update my GNSS receiver firmware?
There is no fixed schedule, but a good rule of thumb is to check for updates every 3–6 months. If a major constellation change occurs (like GPS L5 reaching full operational capability), update immediately. Security patches should be applied as soon as they are available. For stable operations, you don’t need to chase every minor release — but skipping two or more major firmware versions can leave significant performance gains on the table.
Can a firmware update improve RTK fixed status under tree canopy?
Yes, significantly. Newer firmware versions include improved multipath mitigation algorithms and better carrier-phase tracking loops that maintain lock on weaker signals. Operators have reported RTK convergence times dropping from over two minutes to under 30 seconds after updating firmware on the same hardware in the same survey environment. The enhanced strobe correlator and improved signal sensitivity (up to −148 dBm) are directly responsible for these gains.
Will updating firmware erase my receiver configuration?
It depends on the firmware version and receiver model. Some updates preserve user settings; others reset to factory defaults. Septentrio specifically documents this in release notes. The safest approach is always to back up your configuration before updating. Use RxControl to export a complete configuration file, or save settings via the web interface. If settings are lost, you can restore from a backup in minutes rather than spending hours reconfiguring from scratch.
What happens if a firmware update fails mid-installation?
Septentrio receivers have a built-in safe mode (bootloader) that activates if the firmware update is interrupted. The receiver will not be permanently bricked. You can recover by reconnecting via USB and uploading the correct firmware file through the bootloader interface. The key rule: never disconnect power or USB during the update process. If an update does fail, consult the receiver’s recovery documentation — the process is straightforward but requires the right cable connection and a clean firmware file.
Does firmware support for Galileo HAS require a subscription or just an update?
Galileo High Accuracy Service (HAS) provides free centimeter-level corrections globally through the Galileo signal itself. The firmware must support the HAS decoding and correction application. With compatible Septentrio firmware (version 4.9.0 and later on mosaic receivers), Galileo HAS is available as a free service — no subscription needed. The firmware update enables the receiver to decode the HAS data stream embedded in the Galileo E6 signal. This is one of the most compelling reasons to keep firmware current: unlocking free high-accuracy services that did not exist when the receiver was manufactured.